Demo for analysis of phase oscillators with delay
(contributed by Azamat Yeldesbay)
Contents
(c) DDE-BIFTOOL v. 3.1.1(126), 05/09/2016
This demo shows that phase oscillators and rotations can be treated as periodic orbits.
The equation:

It is a simple model of an oscillator with intrinsic delayed feedback driven by an external periodic force. Parameters of the system are alpha = 1/3, tau = pi, and for nu in [0.5 , 1.5 ], epsilon in [0,0.1]. The rotation solution appears, for example, at alpha=1/3, tau=pi, epsilon=0.02, nu=1.3, or epsilon=0.005 and nu=1. A periodic solution after Hopf bifurcation appears at alpha=1/3, tau=pi, epsilon=0.03, and nu=1.
clear close all addpath('../../ddebiftool/',... '../../ddebiftool_extra_psol/',... '../../ddebiftool_utilities/');
r.h.s. and initial parameters
indnu=1;
indeps=2;
indtau=3;
indalpha=4;
indper=5;
f=@(psi,p)1-p(indnu)+p(indalpha)*sin(psi(1,2,:)-psi(1,1,:)-p(indnu)*p(indtau))-...
p(indeps)*sin(psi(1,1,:));
par0([indnu,indeps,indtau,indalpha])=[1.3,0.02,pi,1/3];
getp=@(br,ind)arrayfun(@(x)x.parameter(ind),br.point);
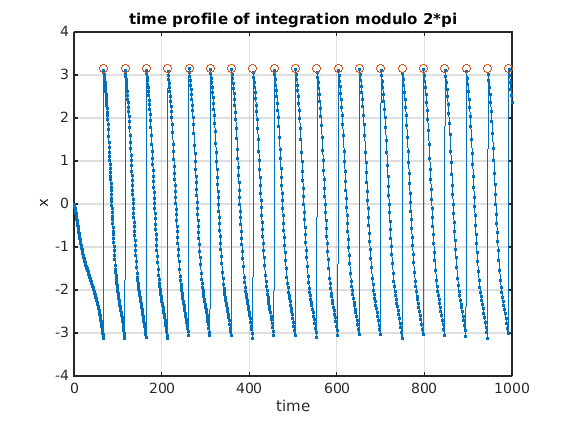
Integrate to observe rotations
sol23=dde23(@(t,y,z)f([y,z],par0),par0(indtau),0,[0,1000],... ddeset('Events',@(t,y,z)cross_pi_dde23(y),'RelTol',1e-6));
Plot solution time profile
figure(1);ax1=gca; plot(ax1,sol23.x,mod(sol23.y+pi,2*pi)-pi,'.-',sol23.xe,mod(sol23.ye,2*pi),'o'); xlabel(ax1,'time'); ylabel(ax1,'x'); grid(ax1,'on'); title(ax1,'time profile of integration modulo 2*pi');
Create functions for ddebiftool
Note that we add an equation to track the period as an independent parameter (parameter(5))
funcs=set_funcs('sys_rhs',f,'sys_tau',@()indtau,... 'sys_cond',@(pt)copy_period(pt,indper),'x_vectorized',true);
Cut out final full rotation period and create initial piece of branch
We specify the index of the period as a parameter in the optional argument indperiod. Other ooptinoal parameters are passed on to p_correc.
rot_br=branch_from_sol(funcs,sol23,[indnu,indper],par0,'indperiod',indper,... 'extra_condition',true,'print_residual_info',1);
it=1, res=0.0207629 it=2, res=1.49643e-05 it=3, res=4.16791e-10 it=1, res=0.120415 it=2, res=0.0158882 it=3, res=0.000144747 it=4, res=5.85404e-09
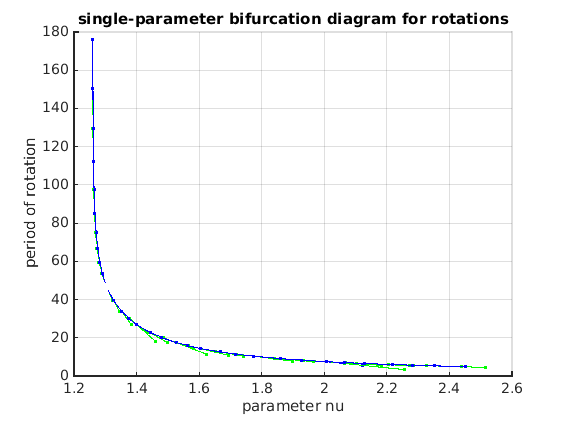
Continue branch of rotations
figure(2);clf;ax2=gca; xlabel(ax2,'parameter nu'); ylabel(ax2,'period of rotation'); grid(ax2,'on'); title(ax2,'single-parameter bifurcation diagram for rotations'); rot_br=br_contn(funcs,rot_br,30,'plotaxis',ax2); rot_br=br_rvers(rot_br); rot_br=br_contn(funcs,rot_br,10,'plotaxis',ax2); hold(ax2,'off');
it=1, res=0.0369315 it=2, res=0.001123 it=3, res=1.75086e-06 it=4, res=4.0151e-11 it=1, res=0.0606396 it=2, res=0.00355682 it=3, res=1.92371e-05 it=4, res=8.65493e-10 it=1, res=0.000297648 it=2, res=5.39853e-11 it=1, res=0.106307 it=2, res=0.015299 it=3, res=0.000403976 it=4, res=3.73716e-07 it=5, res=8.332e-12 it=1, res=0.197638 it=2, res=0.343365 it=3, res=0.0703184 it=4, res=0.010634 it=5, res=0.00042007 it=1, res=0.0163169 it=2, res=0.000354355 it=3, res=2.43707e-07 it=4, res=5.79448e-12 it=1, res=0.000127758 it=2, res=1.44373e-11 it=1, res=0.0477811 it=2, res=0.00472865 it=3, res=5.07049e-05 it=4, res=9.29968e-09 ...
Compute stability
[nunstrot,domrot,triv_defectrot,rot_br.point]=... GetStability(rot_br,'funcs',funcs,'exclude_trivial',true);
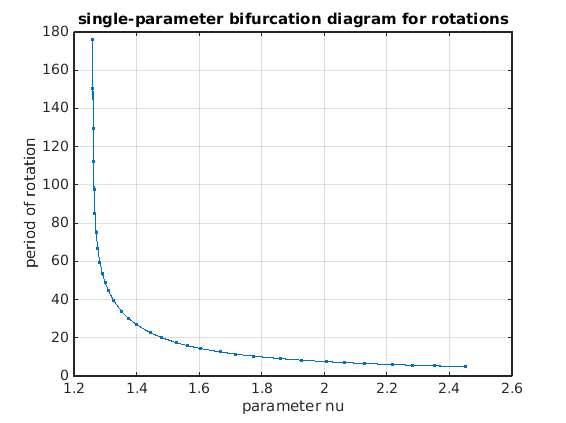
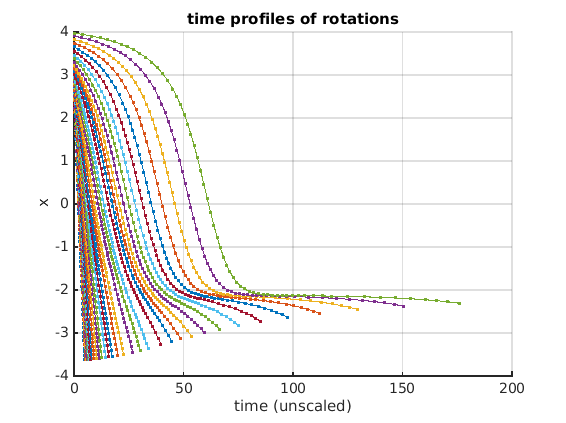
Plot solution profiles and bifurcation diagram of rotations
rot_nu=arrayfun(@(x)x.parameter(indnu),rot_br.point); rot_period=arrayfun(@(x)x.period,rot_br.point); figure(2);clf;ax2=gca; plot(rot_nu,rot_period,'.-'); hold(ax2,'off'); xlabel(ax2,'parameter nu'); ylabel(ax2,'period of rotation'); grid(ax2,'on'); title(ax2,'single-parameter bifurcation diagram for rotations'); figure(3);clf;ax3=gca; hold(ax3,'on'); for i=1:length(rot_nu) plot(ax3,rot_br.point(i).mesh*rot_period(i),rot_br.point(i).profile,'.-'); end hold(ax3,'off'); xlabel(ax3,'time (unscaled)'); ylabel(ax3,'x'); grid(ax3,'on'); title(ax3,'time profiles of rotations');
%save('phase_oscillator_results.mat');