DDE-BIFTOOL state-dependent delays sd-demo
This demo is an illustrative example, showing how to perform bifurcation analysis for a system with state-dependent delays.
The demo shows
- which functions the user has to provide and how to put them into the structure funcs (sd_demo_funcs.html)
- continuation of equilibria and their linear stability sd_demo_stst.html,
- detection and continuation of Hopf bifurcations sd_demo_hopf.html,
- branching off from Hopf bifurcation and continuation of periodic orbits sd_demo_psol.html
% (c) DDE-BIFTOOL v. 3.1.1(20), 11/04/2014
Contents
Differential equations
The differential equations for this example are
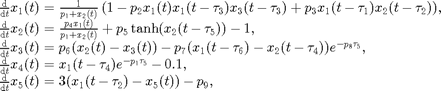
where  and
and  are constant delays and
are constant delays and

This system has five components  , six delays
, six delays  and eleven parameters
and eleven parameters  , where
, where  and
and  .
.
clear; % clear variables close all; % close figures addpath('../../ddebiftool/'); % add ddebiftool folder to path %#ok<*ASGLU,*NOPTS,*NASGU>